VEAS-3000
视觉定位系统
2018-06-24
为适应工业4.0智能化、柔性好的需要,视眸图像推出全新架构的新一代视觉定位系统VEAS-3000及VEAS-3000G系统,其中VEAS-3000支持usb相机,VEAS-3000G支持Gige相机,该系统采用开放平台的模式,支持多个品牌相机,分辨率支持到1200万像素;支持8个相机调试对位;支持4个平台同时工作;支持多种PLC直接通讯;支持轴卡直接控制。客户根据需要自由选择对位方式。
详细介绍:

◆对位流程:
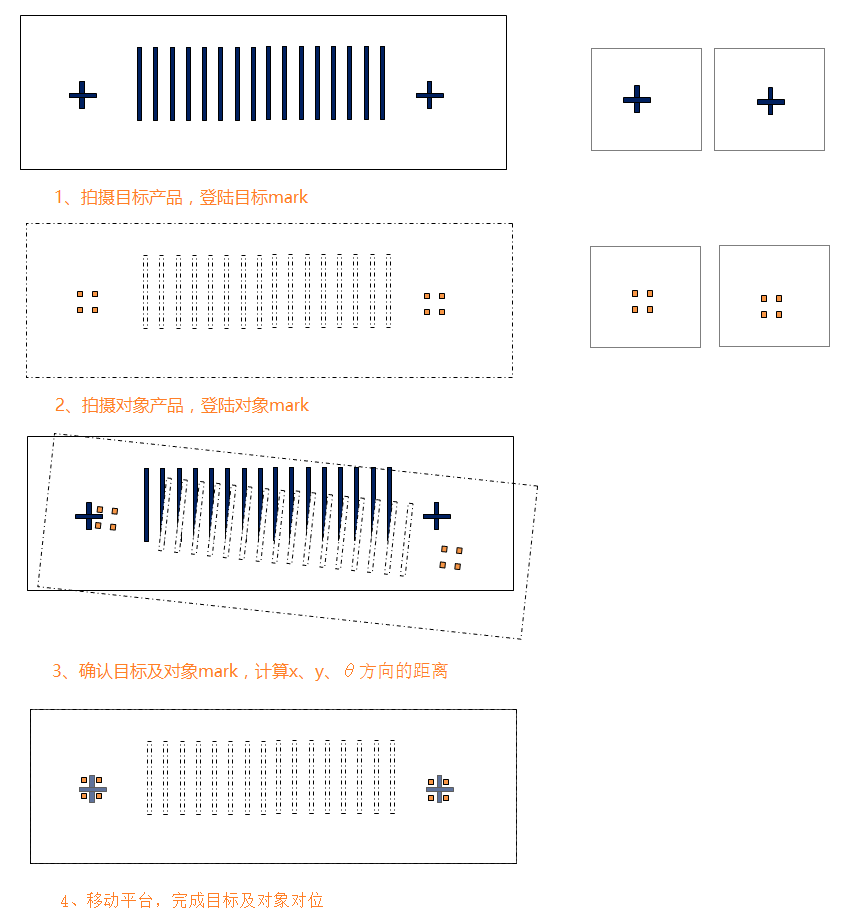
自动视觉对位的主要工作流程通常是先对目标物体(通常固定不动)的MARK进行拍照,再对对象物体(通常为平台上物体)的Mark进行拍照,完成两组Mark的拍照后,计算出对象到目标之间的X、Y、θ方向的距离,系统发送间距值给平台马达,平台带对象物移动相应的移动量,从而将对位物移动到目标位置,可以通过再次确认对象物Mark确认移动精度,确认是否再次移动
◆通讯协议:
无协议通讯:传统字符串指令发送方式,支持TCP/IP网络通讯(客户端及服务器端)及串口RS232T通讯;
PLC直接通讯:上位机无需编程,只需要在约定的寄存器中写入相应的指令数字代码即可完成与图像处理器的通讯,可以快速完成设备与图像处理器的联合调试。目前支持PLC链接方式通讯的主要PLC厂家如下:三菱电机 Melmsc系列、 基恩士 KV系列(支持KV-COM+及数据链路协议、MC协议)、欧姆龙 SYSMAC、 松下电工FP系列、安川电机MP系列
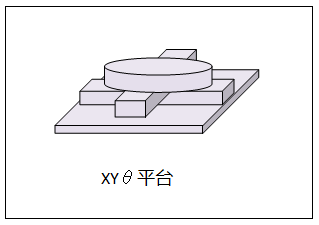
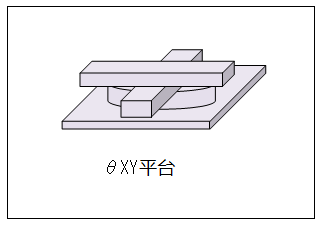
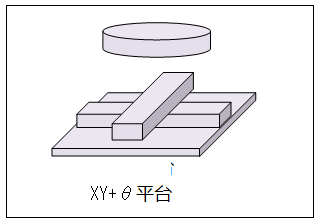
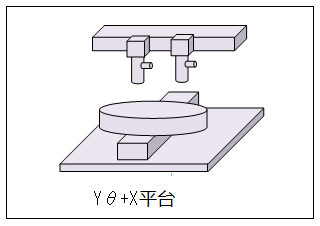
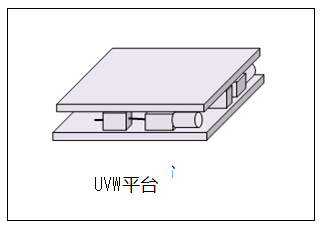
◆支持平台:
支持XYθ、X+Yθ、Y+Xθ、XY+θ、UVW、Xθ等多种平台

◆应用领域:
1、COG、FOG 2、背光组装 3、偏光片贴合 4、曝光机 5、玻璃切割 6、丝网印刷 7、点胶机 8、点灯检查 9、自动抓取
◆对位方式:
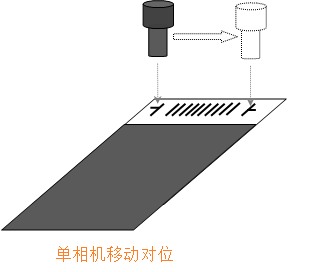
1、单相机对位(相机移动拍照):相机安装在一个X方向的轴上,产品在平台上不移动,相机移动拍照产品的两个Mark,由于只能做一次对位,相对精度不够高,主要用于产品的上下料及预对位。
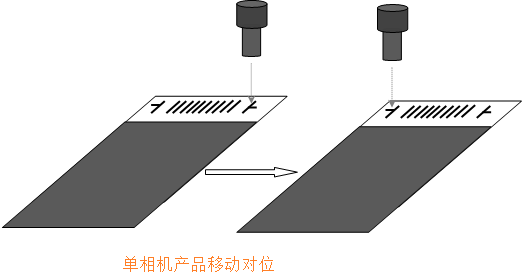
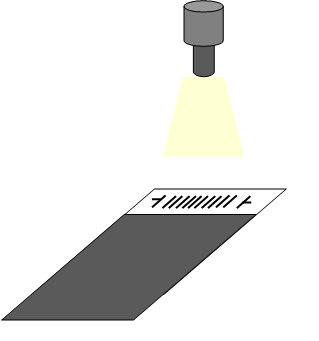
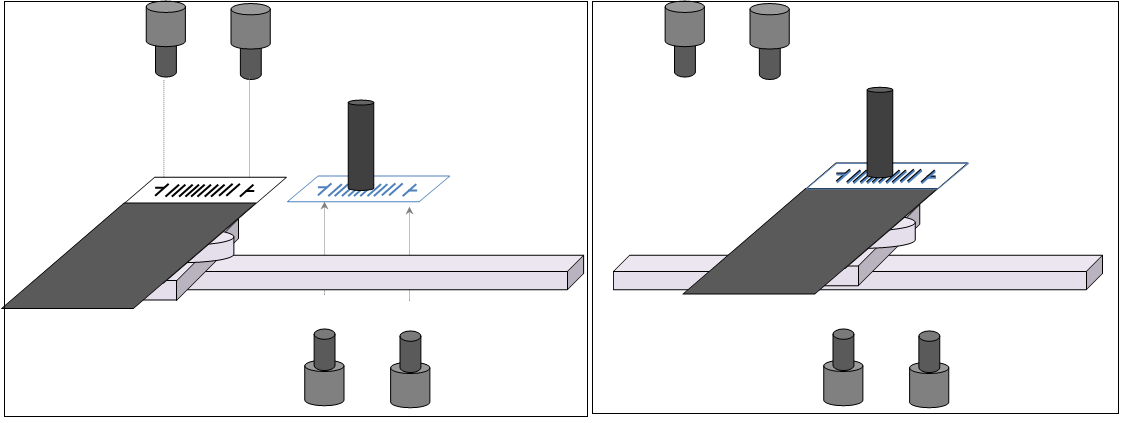
2、单相机对位(产品移动拍照):只有一只相机固定安装,产品在平台上或者机械手臂上,如下图,产品的右边先进入视野,拍照完成后,平台或者机械手移动产品,使左边的Mark进入相机视野,拍照完成后,发送对位计算指令,获取产品的相对或者决定位移量。
3、单相机对位(单相机一次拍两个Mark):一般是高分辨率相机一次拍摄2个Mark,主要用于Mark小间距的对位,如小间距的COG预压工位,可以做多次对位。
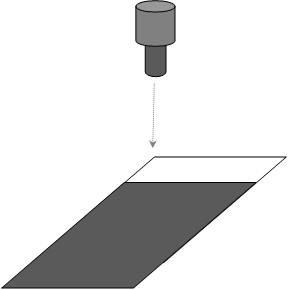
4、单相机(产品的直角边):主要用于料盘上下料情况下,产品偏移角度较大,用产品的直角边对产品进行位置及角度定位
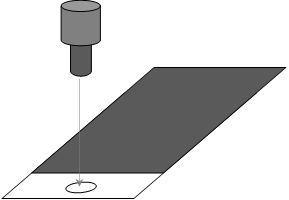
5、单相机对位(点线对位方式):单相机对位,视野中一个mark用于确定对位的中心点,如下图的盖板的圆孔,用视野中一条确定的线条定位产品的角度,通过参考点和线的角度进行产品的定位
6、双相机对位:一般用于高精度对位,可以先拍摄目标mark,然后再拍照产品的对象mark,拍照完成后,进行一次移动,并再次拍照对象的mark,判断目标与对象的偏差,直到满足产品的精度要求。
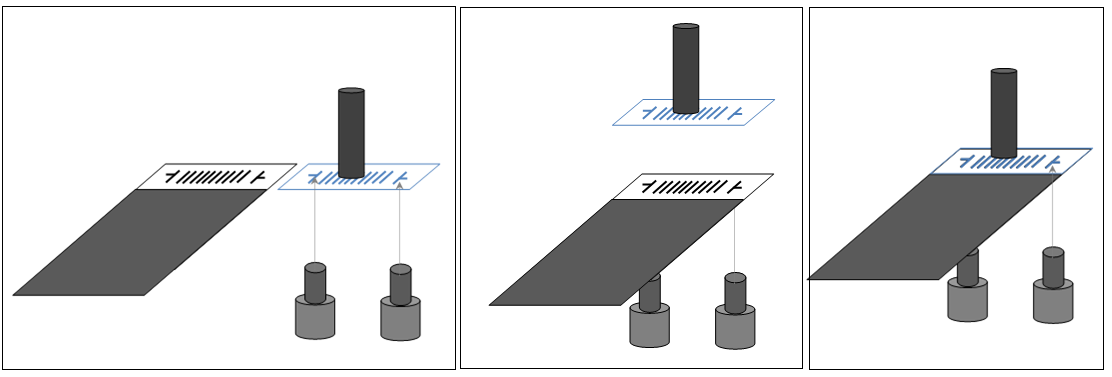
7、4相机关联对位:有些双相机对位,目标和对象不可能再同一个方向拍照到,如目标只能从下向上拍照,对象只能从上向下拍照,可以通过4相机对位方式,两个相机拍目标,两个相机拍对象,计算出目标与对象的偏差,进行对位。
◆主机尺寸:

